
MOOC Estimation des incertitudes de mesure en analyse chimique
4. Les concepts et outils fondamentaux
4.5. Distribution rectangulaire et triangulaire
Résumé : La distribution rectangulaire et la distribution triangulaire sont expliquées, ainsi que la manière dont les incertitudes correspondant à la distribution rectangulaire ou triangulaire peuvent être converties en incertitudes types. Souvent, les informations sur la fonction de distribution sont manquantes et ensuite, une fonction de distribution est généralement supposée ou postulée. Les distributions rectangulaires et triangulaires font partie des fonctions de distribution postulées les plus courantes. Des recommandations sont données.
Distribution rectangulaire et triangulaire
http://www.uttv.ee/naita?id=17584
| Let us now examine some other distribution functions besides the normal distribution. As I explained the normal distribution has unique importance in measurement science but there are a few others that are also important and we will now look at the rectangular and triangular distribution and we will do that on the example of a pipette again. We look at this pipette. The uncertainty of calibration of this pipette is 0.03 mL and if we look at it we see that there's a sign of plus minus in front of the 0.03 and there's no information given anywhere here about the status of this uncertainty about the distribution function or about the coverage factor. Let us see how we should handle this kind of information that comes in a limited way meaning there's a lack of concrete information about the uncertainty. The usual way that people handle this kind of situation is that some distribution function is assumed or is postulated and rectangular and triangular distributions are the most frequent ones to be used in this case. So let us look at the rectangular distribution. We have here the probability and possible values for the measurement and let it be the calibrated volume of the pipette. And this is here 10 mL. And now this uncertainty ±0.03 would be here like follows. And now if it is rectangular distribution then this means that the probability of the true calibrated volume being anywhere within this range is equal meaning that the area under this curve is unity. The probability of the volume being outside is zero and there's no distinction between any of these values here. Now if we want to use this uncertainty estimate this ±0.03 mL in us uncertainty calculation. We have to convert it somehow into standard uncertainty and converting from rectangular distribution to standard uncertainty is very easy and can be done as follows. It is simply divided by square root of three. So that whenever we have uncertainty expressed as plus/minus some value and we have a reason to assume rectangular distribution we always can find the standard uncertainty estimate by dividing by square root of three. Let us now look at the triangular distribution. It's quite similar to the rectangular distribution but with difference in shape. Again we have here probability we have volume. But now this time the probability of the true calibrated volume being near 10 is higher than being near 10.03 or 9.97 and the shape of the distribution curves looks as a triangle. I deliberately have drawn in such a way that the areas under these two curves are equal. So in both cases the probability of being within this range is 100 % and being outside here is zero but in this case yes as I said the probability of being near ten is higher than away from it. And how do we convert now ? So if we have uncertainty estimate given as plus minus 0.03 then the standard uncertainty estimate of this would be divided by square root of 6 which is equal to roughly 0.012 mL. Now how do we choose which of these two distributions we assume if we do not have information which one is true ? Usually I would recommend such an approach that you choose the way by which the probability of under estimating uncertainty is lower. If we look now then the standard uncertainty estimate of this calibrated volume will be higher if we assume rectangular distribution then if we assume triangular distribution. Therefore as a general rule if you have uncertainty given as plus minus some value and you do not have any information about that uncertainty range I recommend that you assume rectangular distribution. We now look at these two distribution functions only as assumed or postulated distribution functions and you may ask that : "well are there any real cases where rectangular distribution for example really hold ?" And indeed there are. They are not numerous, this distribution does not come up very often but if we speak about rounding of digital reading for example in a digital balance or some other digital meter then the uncertainty due to rounding is strictly uncertainty according to the rectangular distribution and then this dividing by square root of three is a strict operation not an assumption as we have known. How does it work with this rounding uncertainty ? Let us look at a small example. Suppose we have a reading of some instrument let's say pH meter and let's say that reading would be 7.42. So the pH value of some water is 7.42. It's digital reading so we have these two decimals we don't have any other but obviously actually there are more digits that simply are not seen by us because the analog digital converter does not give them to us. So the true reading can be for example 7.418. It can also be 7.424. And it can also be different other values but if we now look carefully it's obvious that this reading certainly will be within the range of… If it were lower than 7.415 we would already see 7.41. If it were higher than this value we would see 7.43. Therefore in this case we know it is between these limits and we have absolutely no information absolutely no preference where it actually is so indeed it is fully reasonable to assume in this case uniform or rectangular distribution. This is also interesting from another point of view. If you remember the introductory lecture of this course I stressed that we almost never can have uncertainty in such a way that some value is strictly within the limits. It turns out now that this particular uncertainty source is strictly within these limits so it cannot be outside. Therefore the probability outside of this rectangle indeed is zero. Though this does not hold always. So if this distribution function is just a postulated distribution function without strict physical background behind it then it is possible that there's also some tiny small probability somewhere but it is assumed to be zero and from practical point of view it does not really matter. |
Examinons désormais quelques autres fonctions de distribution en plus de la distribution normale. Comme je l’ai expliqué, la distribution normale possède une importance unique dans la science de la mesure mais il y en a quelques autres qui sont aussi importants et nous allons maintenant regarder les distributions rectangulaire et triangulaire et nous allons faire cela avec l’exemple de la pipette encore une fois. Nous regardons cette pipette. L’incertitude de calibration de cette pipette est de 0,03 mL et si nous la regardons bien, nous voyons qu’il y a un signe plus/moins devant le 0,03 et il n’y a aucune information donnée ici à propos du statut de cette incertitude sur la fonction de distribution ou sur le facteur de distribution. Regardons comment nous devrions utiliser ce genre d’informations qui viennent d’une façon limitée ce qui veut dire qu’il y a un manque d’informations concrètes sur l’incertitude. La façon habituelle dont les gens gèrent ce genre de situation est que certaines fonctions de distribution sont assumées ou postulées et les distributions triangulaire et rectangulaire sont les plus fréquentes à utiliser dans ce cas. Regardons la distribution rectangulaire. Nous avons ici la probabilité et les valeurs possibles de la mesure et que ce soit le volume calibré de la pipette. Et ici, c’est 10 mL. Et maintenant cette incertitude de ±0,03 sera, ici, comme suit. Et maintenant si c’est une distribution rectangulaire, cela veut dire que la probabilité que le vrai volume calibré soit n’importe où dans cette zone est égale, ce qui veut dire que l’aire sous cette courbe est unitaire. La probabilité que le volume soit à l’extérieur est de zéro et il n’y a aucune distinction entre ces valeurs. Maintenant, si nous voulons utiliser cette incertitude estimée, ce ±0,03 mL dans notre calcul d’incertitude. Nous devons le convertir d’une certaine façon en incertitude type et le convertir depuis la distribution rectangulaire vers une incertitude type est très simple et peut être fait comme suit. C’est simplement divisé par la racine carrée de trois. Donc à chaque fois que nous avons une incertitude exprimée en plus ou moins telle valeur et que nous avons une raison d’assumer la distribution rectangulaire, nous pouvons toujours trouver l’incertitude type estimée en divisant par la racine carrée de 3. Nous allons maintenant regarder la distribution triangulaire. C’est très ressemblant à la distribution rectangulaire mais avec une différence dans la forme. Encore une fois, nous avons ici la probabilité et ici nous avons le volume. Mais cette fois, la probabilité que le vrai volume calibré soit proche de 10 est supérieure à celle d’être proche de 10,03 ou 9,97 et la forme de la courbe de la distribution ressemble à un triangle. J’ai délibérément dessiné de sorte que les aires sous ces deux courbes soient égales. Donc, dans les deux cas, la probabilité d’être dans cet intervalle est de 100% et celle d’être à l’extérieur est de 0 mais dans ce cas, comme je l’ai dit, la probabilité d’être proche de 10 est plus grand que d’en être loin. Et comment nous convertissons maintenant ? Donc si nous avons une incertitude estimée donnée sous forme de plus ou moins 0,03 alors l’incertitude type estimée de cela serait divisée par la racine carrée de 6, pour un résultat égal grossièrement à 0,012 mL. Maintenant, comme nous choisissons laquelle de ces deux distributions nous utilisons si nous n’avons pas d’informations sur laquelle est vraie ? Habituellement, je recommanderai une approche telle que vous choisissez la façon pour laquelle la probabilité de sous-estimer l’incertitude est la plus basse. Si nous regardons maintenant, l’estimation de l’incertitude type de ce volume calibré sera plus élevée si nous utilisons la distribution rectangulaire plutôt que si nous utilisons la distribution triangulaire. Par conséquent, comme une règle générale si vous avez une incertitude donnée sous forme de plus ou moins une valeur et que vous n’avez pas d‘informations sur l’intervalle d’incertitude, je vous recommande d’utiliser la distribution rectangulaire. Nous allons maintenant regarder ces deux fonctions de distribution seulement comme des fonctions de distribution assumées ou postulées et vous pouvez vous demander : « est-ce qu’il y a des vrais cas où la distribution rectangulaire peut réellement fonctionner ? ». Et en effet, il y en a. Ils ne sont pas nombreux, cette distribution n’est pas utilisée très souvent mais si nous parlons d’arrondis de la lecture numérique, par exemple sur une balance numérique ou sur d’autres compteurs numériques alors l’incertitude liée à l’arrondissement est strictement une incertitude fonction de la distribution rectangulaire et par conséquent, cette division par la racine carrée de trois est une opération rigoureuse et pas une supposition comme nous le savions. Comment cela fonctionne avec une incertitude d’arrondis ? Nous allons regarder un petit exemple. Supposons que nous avons une lecture d’un quelconque instrument, disons un pH-mètre et disons que la valeur lue est 7,42. Donc la valeur de pH d’une certaine eau est 7,42. C’est une lecture numérique donc nous avons ces deux décimales et nous n’en avons pas d’autres mais évidemment en réalité il y a plus de chiffres mais ils ne sont simplement pas vus par nous parce que le convertisseur numérique analogique ne nous les donne pas. Par conséquent, la vraie valeur peut être par exemple 7,418. Elle peut être aussi 7,424. Et elle peut être aussi d’autres valeurs mais si maintenant nous regardons attentivement, il est évident que cette lecture sera dans l’intervalle entre… Si c’était plus petit que 7,415 nous verrions 7,41. Si c’était plus grand que cette valeur, nous verrions 7,43. Par conséquent, dans ce cas nous savons qu’elle est entre ces deux limites et nous avons absolument aucune information, absolument aucune préférence de où elle est vraiment, donc en effet il est totalement raisonnable d’admettre, dans ce cas une distribution uniforme ou rectangulaire. Ceci est également intéressant depuis un autre point de vue. Si vous vous souvenez la leçon d’introduction de ce cours, j’ai souligné que nous ne pouvons presque jamais avoir une incertitude de telle sorte qu’une certaine valeur est strictement entre ces limites. Il s’avère maintenant que cette source d’incertitude particulière est strictement entre ces limites donc elle ne peut pas être à l’extérieur. Par conséquent, la probabilité d’être à l’extérieur de ce rectangle est en effet de zéro. Bien que cela ne tienne pas toujours. Donc si cette fonction de distribution est juste une fonction de distribution postulée sans un arrière-plan physique rigoureux derrière alors il est possible qu’il y ait aussi une toute petite probabilité quelque part mais il est admis qu’elle est de zéro et depuis ce point de vue pratique ce n’est pas vraiment important. |
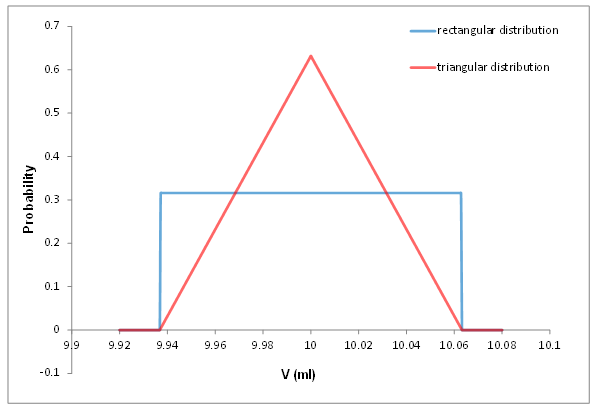
Distributions rectangulaires et triangulaires.
Les deux distributions correspondent à la situation (10.000 ± 0,063) ml.
Sur la base d'une distribution rectangulaire, l'incertitude type peut être calculée par l'incertitude divisée par racine de 3
Sur la base d'une distribution triangulaire, l'incertitude type peut être calculée par l'incertitude divisée par racine de 6.
L’estimation de l’incertitude de mesure conduit souvent à choisir entre deux options, l’une pouvant conduire à une incertitude quelque peu surestimée et l’autre à une incertitude légèrement sous-estimée. Dans une telle situation, il est généralement raisonnable de surestimer plutôt que de sous-estimer l’incertitude.
Autoévaluation sur cette partie du cours : Test 3.5